







機械工学科・牧田グループで取り組んだ災害対応ロボットの卒業研修テーマを紹介します!!
2023.10.13
2年生になると受講できる「卒業研修」について紹介します。今回は機械工学科の牧田 太郎 講師のグループの活動を取り上げます。牧田グループでは「学生さんの調べたいこと・つくりたいものを重視して」学生さんと牧田講師がディスカッションして研修テーマが決まります。昨年の2022年度は「災害対応ロボットの製作」のテーマで活動がおこなわれました。
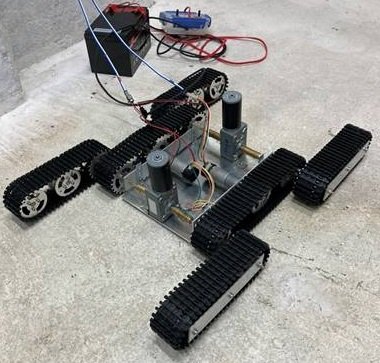 段差を乗り越えるためにアーム状のクローラーを接続した1号機
段差を乗り越えるためにアーム状のクローラーを接続した1号機
上の写真は、最初に試作した災害対応ロボットの1号機です。段差を乗り越えるために、車体に直結した中央のクローラー(無限軌道ともいいます)の前後に、アーム状に動かすことができるクローラーを取り付けています。
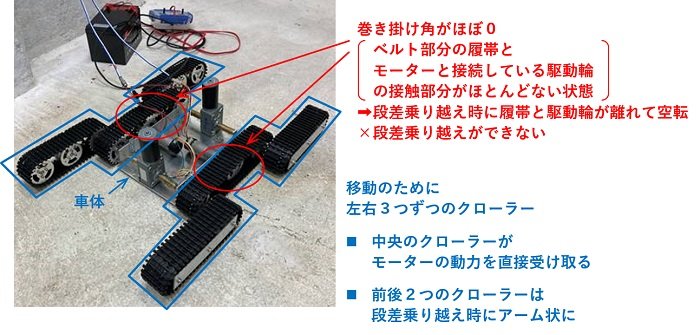 しかし、この1号機はうまく段差を乗り越えられませんでした。段差を乗り越えるときに、クローラーの履帯(黒色のベルト部分)とモーターの動力を伝える駆動輪が離れてしまい、前に進まなくなりました。これは、駆動輪をクローラーの中央にしたためで、巻き掛け角がほぼ0の状態(履帯と駆動輪の接触部分がほとんどない状態)となり、段差乗り越え時に駆動輪が履帯から離れて空転するようになってしまうからです。
しかし、この1号機はうまく段差を乗り越えられませんでした。段差を乗り越えるときに、クローラーの履帯(黒色のベルト部分)とモーターの動力を伝える駆動輪が離れてしまい、前に進まなくなりました。これは、駆動輪をクローラーの中央にしたためで、巻き掛け角がほぼ0の状態(履帯と駆動輪の接触部分がほとんどない状態)となり、段差乗り越え時に駆動輪が履帯から離れて空転するようになってしまうからです。
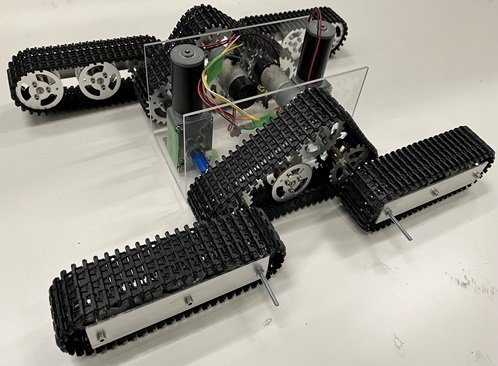
中央のクローラーを三角形状にしたことで段差乗り越えが可能になった2号機
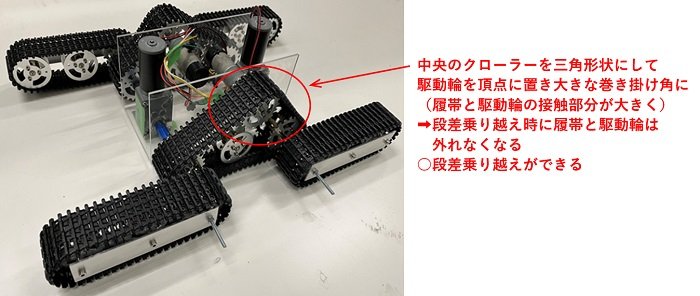
そこで、2号機では上の写真のように、中央のクローラーを三角形状とし、その頂点に駆動輪を置くことによって、大きな巻き掛け角を確保しました(履帯と駆動輪の接触部分を大きくしました)。その結果、段差乗り越え時にも履帯と駆動輪は外れず、しっかりと段差乗り越えができるようになりました。
ちなみに、1号機のような配置の問題は、教科書にも載っていない情報です。1世紀以上前、戦車のようにクローラーをもつ装軌車両が世界で初めて開発された時に判明していたはずです。研究データを探してみましたが、ちょっと見つかりませんでした。もしかすると、第1次世界大戦で使用された菱形戦車やリトル・ウィリーが開発された時には研究データがとられていたのかもしれません。
ご紹介した災害対応ロボットの段差乗り越えの検討は、授業で学んだ「機構学」の知識をもとに学生が協力して考え出したことです。クローラーの専門知識を持たない0からの出発で、後から考えると遠回りになってしまったかもしれませんが、自分で考え、試行錯誤した経験は今後も役に立つことと期待しています。
昨年は他に「魚型ロボットの製作」のテーマも実施しました。また、今年の2023年度の牧田グループは「ミニ四駆」や「アーム型ロボット」をキーワードに活動しています。機会がありましたら、こちらもご紹介します。
